OmniManip 是由北京大學與智元機器人聯合實驗室開發的一款通用機器人操作框架,旨在提升機器人在非結構化環境中的操作能力。透過結合視覺語言模型(VLM)的高層次推理能力與精確的三維操作能力,OmniManip 使機器人能夠執行更複雜的動作,並適應多種場景。其核心技術採用了以物件為中心的交互基元標記法,將任務拆解為多個結構化階段,使機器人能夠更靈活地完成各類操作。
OmniManip 的核心功能
1. 零樣本泛化能力
OmniManip 可直接處理多種開放詞彙指令與不同類型的物品,無需額外訓練即可適應多樣化的機器人操作任務。例如,無需預先訓練,機器人即可理解並執行「將水倒入杯中」或「整理桌面」等任務。
2. 跨機器人形態適應性
OmniManip 採用硬體無關的方法設計,使其能夠輕鬆部署於不同類型的機器人平臺,如雙臂人形機器人、移動機械臂等。這意味著不同類型的機器人都能夠運用 OmniManip 來提升操作能力。
3. 大規模模擬資料生成
該框架能自動化生成大規模的機器人操作模擬數據,為未來機器人研究提供豐富的訓練資源,進一步提升機器人的學習能力與適應性。
OmniManip 的技術原理
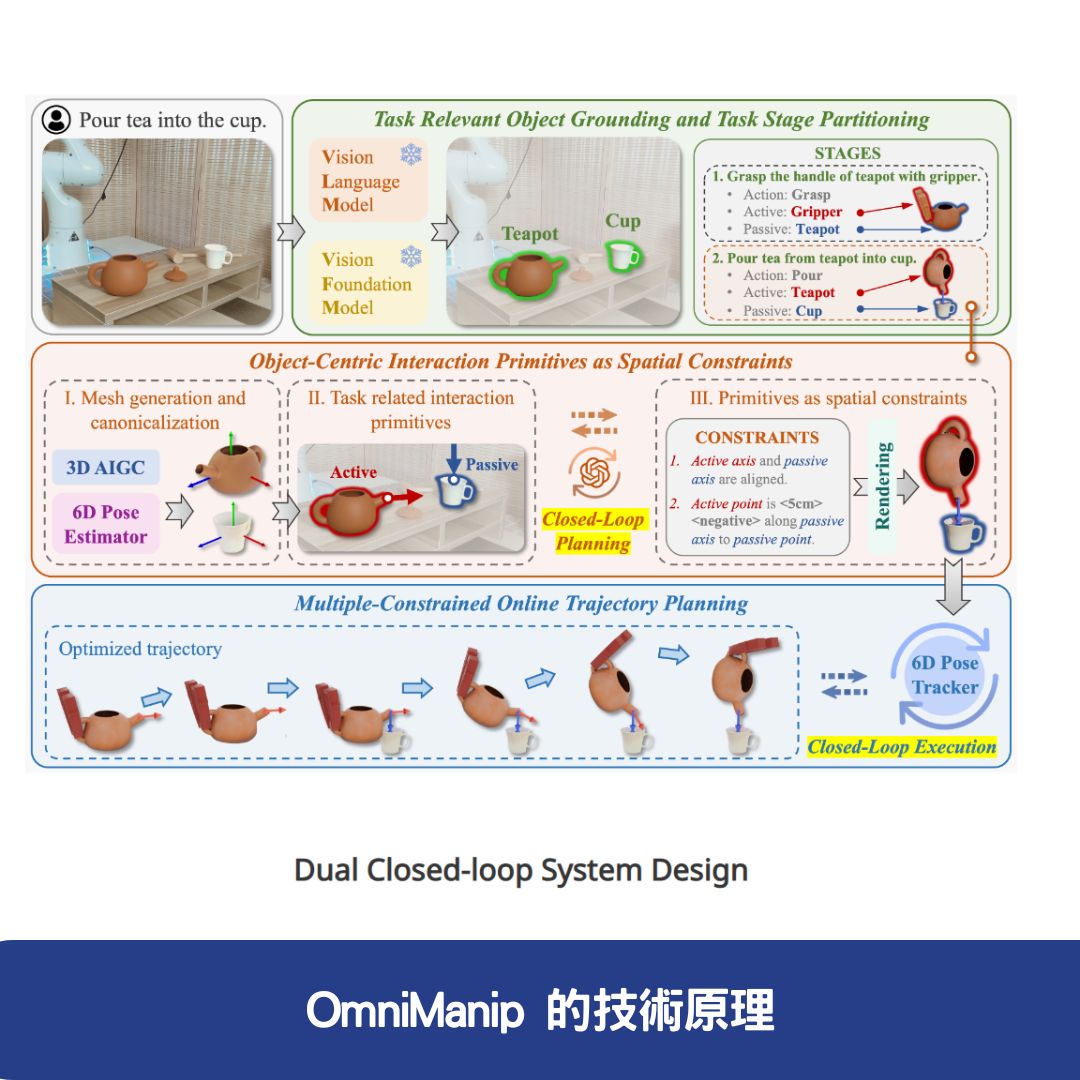
1. 以物件為中心的交互基元標記法
OmniManip 採用了一種新穎的交互基元標記方法,基於物件的功能性空間(canonical space)來定義交互基元,如交互點與交互方向。這些標記確保機器人在不同環境中仍能保持一致的操作方式,從而提高適應性與通用性。
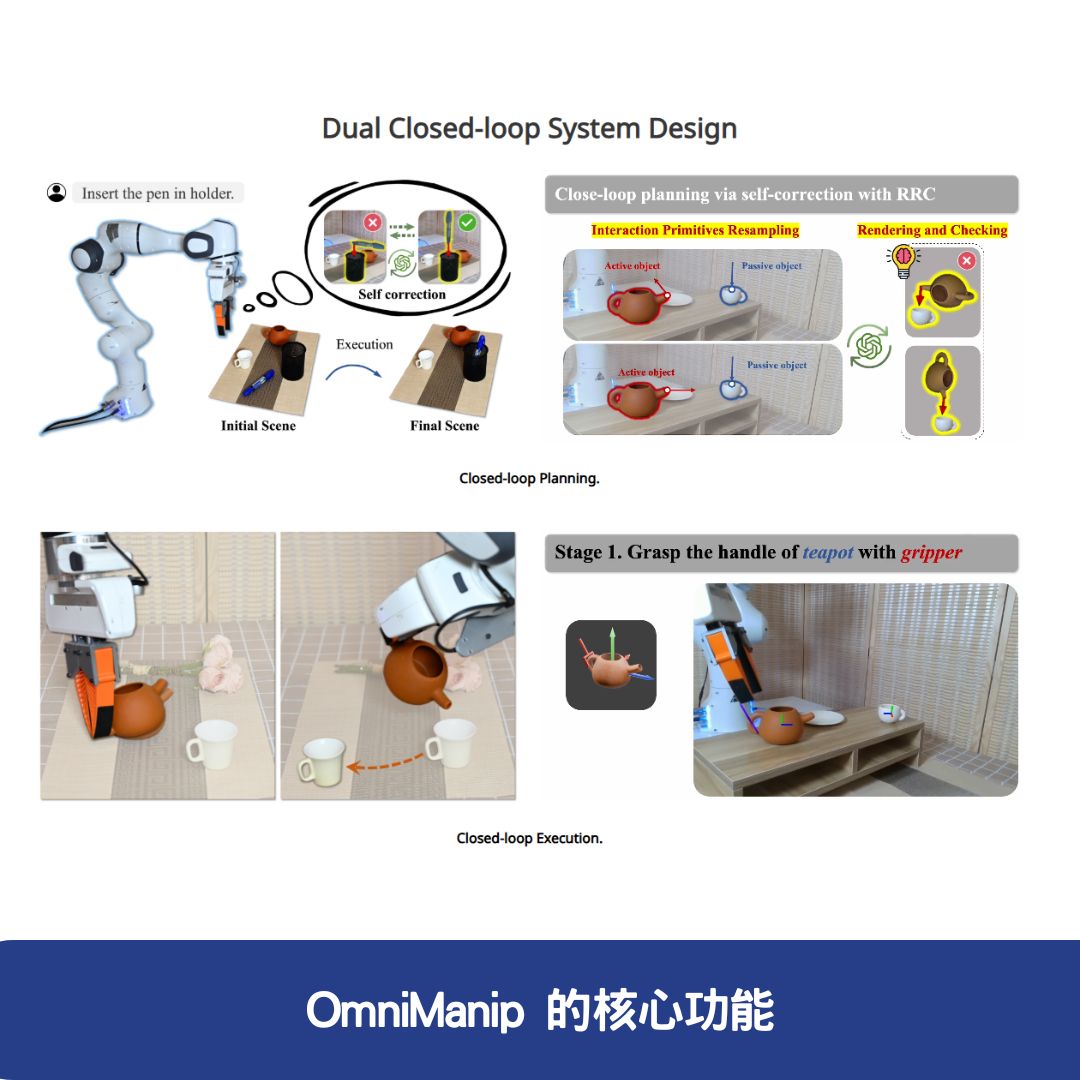
2. 雙閉環系統設計
OmniManip 採用雙閉環系統,以確保規劃與執行的準確性。
閉環規劃
- OmniManip 透過交互渲染與交互原語重採樣來進行 VLM 的閉環推理。
- 能夠檢測並修正 VLM 推理過程中的錯誤(如幻覺問題),確保規劃結果的精確性。
閉環執行
- OmniManip 使用 6D 姿態跟蹤技術,即時更新物件的位置與方向,確保機器人執行的精確性。
- 能夠將物件的動態變化即時轉換為機械臂末端執行器的操作軌跡,提高控制穩定性。
3. 任務分解與空間約束
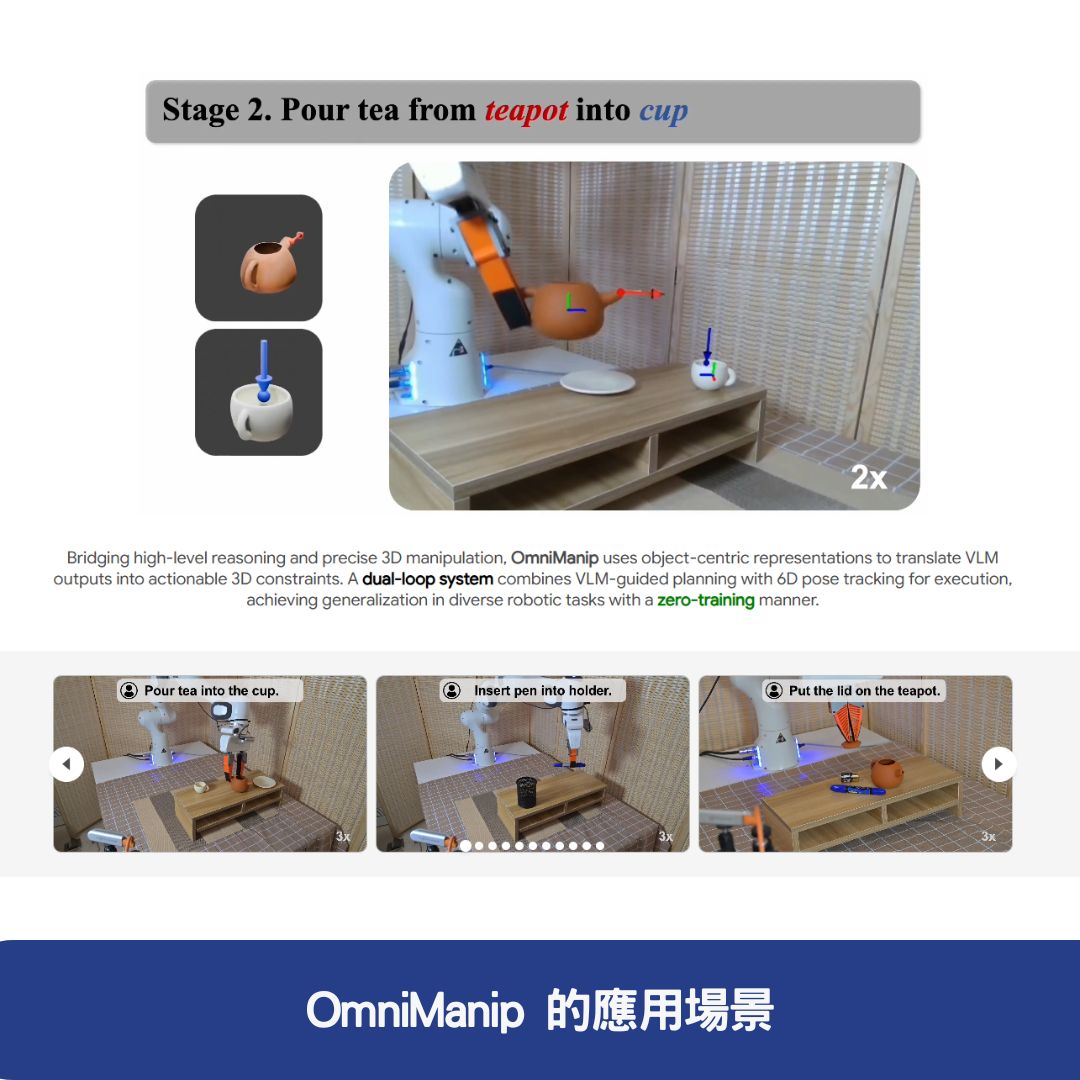
OmniManip 採用結構化的方式將複雜任務分解為多個階段,並為每個階段設計空間約束。例如,在「將茶倒入杯中」的任務中,OmniManip 會將其拆分為「抓取茶壺」與「傾倒茶水」兩個階段,並為每個階段設置對應的交互點與動作方向。
OmniManip 的應用場景
1. 日常生活中的物品操作
OmniManip 可用於執行日常家務,如整理桌面、倒水、插花等,增強機器人在家庭場景中的適應能力。
2. 工業自動化
透過精確的三維操作能力,OmniManip 可應用於工業生產線,提升自動化設備的靈活性,執行如零件組裝、包裝與材料搬運等任務。
3. 服務機器人
OmniManip 可提升服務機器人的能力,使其能夠適應複雜環境,例如醫療機器人協助病患取藥、送水,或智能家居機器人執行烹飪與清潔等任務。
如何獲取 OmniManip?

OmniManip 是開源專案,可通過以下管道獲取:
- 官方網站:OmniManip 官網
- GitHub 倉庫:OmniManip GitHub
- 技術論文:arXiv OmniManip 研究論文
結語
OmniManip 作為一款強大的通用機器人操作框架,結合 VLM 的高層次推理與精確的三維操作,使機器人能夠在非結構化環境中執行更複雜的任務。其零樣本泛化能力、跨機器人形態適應性與大規模數據生成技術,使其在日常應用、工業自動化與服務機器人領域具備廣泛的應用價值。隨著技術的不斷發展,OmniManip 將進一步推動機器人操作的智能化與普及化。
常見問題與答覆(FAQ)
1. OmniManip 是什麼?
答: OmniManip 是由北京大學與智元機器人聯合實驗室開發的通用機器人操作框架。它結合視覺語言模型(VLM)與三維操作技術,使機器人能夠在非結構化環境中執行複雜任務,如家務操作、工業自動化及服務機器人應用。
2. OmniManip 如何實現高精度機器人操作?
答: OmniManip 採用了以物件為中心的交互基元標記法,能夠將任務拆解為多個結構化階段,並透過 6D 姿態跟蹤確保機械臂執行的精確性。此外,該系統還包含雙閉環設計,確保從規劃到執行的高準確性與穩定性。
3. OmniManip 可應用在哪些領域?
答: OmniManip 可應用於多個場景,包括家庭服務(如整理桌面、倒茶)、工業自動化(如材料搬運、零件組裝)以及醫療輔助機器人(如病患照護、藥品分發)。其零樣本泛化能力使其能夠適應各種開放詞彙指令與不同機器人硬體平台。
成為AI學習平台訂閱者

NT$300 / 1個月

NT$900 / 3個月

NT$3,000 / 12個月